
SUII (Sui2)
Second self-built robot and current competition robot

Sui2 is a robot consisting of an AGV (Automated Guided Vehichle), robot arm and deep learning based vision system. Sui2 is built to transport objects between different workstations in an industrial working environment completely autonomously. For example, Sui2 can drive autonomously to the workstation where an object needs to be picked up. When Sui2 has driven to the right location, it uses a computer vision system to detect and locate the correct object. When the object is localized, the object can be picked up and taken to the correct workstation. Suii is used by RoboHub Eindhoven to participate in RoboCup@Work competitions. At the RoboCup@Work competition the robothas to complete tasks as described above. During the 2019 RoboCup@Work competition we got an amazing 5th place during the world championships! Next to the RoboCup@Work competition Sui2 also is used for demonstration purposes at events.

Suii uses two laser scanning rangefinders for localization and object avoidance. The two laser scanner provide a 360 degrees field of view around the robot. In this way Suii can see objects in all driving directions. This is important because Suii is a holonomic robot, this means that Suii can drive in all directions without turning. This is possible due to the special mecanum wheels that Suii has.
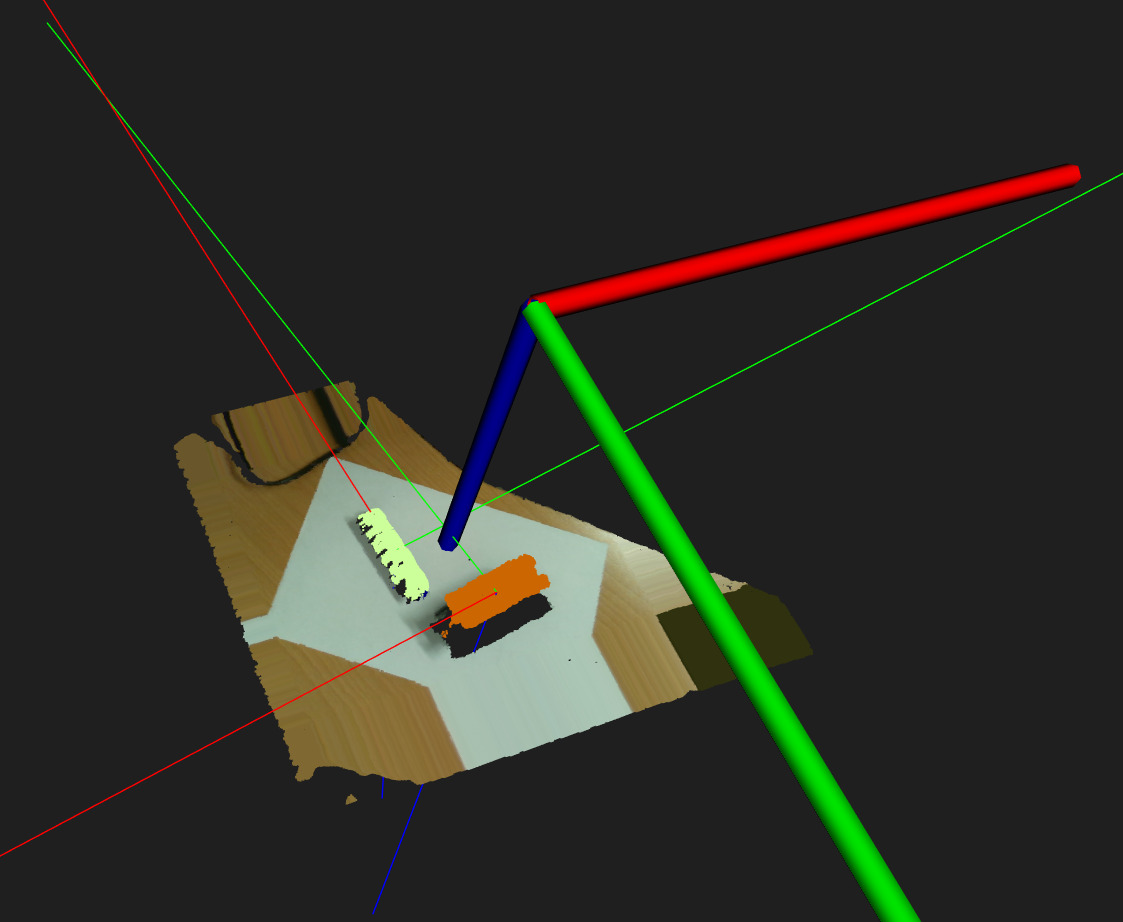
For manipulating objects Suii uses a Universal Robots UR3 robotic arm in combination with a custom made gripper. The UR3 robotic arm is a so called “cobot”, this means that the UR3 has some extra safety measures compared to “normal” industrial robotic arms. Because these extra safety measures it’s safe to use without a robot cell in the neighbourhood of people. To fit the UR3 on the AGV, the original electronics enclosure is changed by a smaller custom built electronics enclosure. At the end of the UR3 robotic arm a custom gripper is mounted for picking objects. A camera is built into the gripper, that is used for Two LED strips are mounted on the gripper to create consistent lighting conditions for the camera.

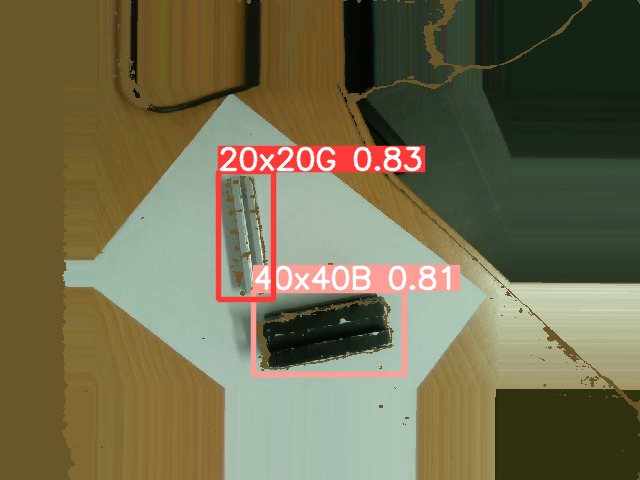
Suii uses the camera to detect and localize objects that have to be moved. For detecting the object a convolutional neural network is used (CNN). The CNN can detect objects in real time, and give a rough estimation of the location of the object. After the object detection by the CNN, a more traditional computer vision algorithm calculates a more accurate position and rotation of the object.
For more technical information hardware and software wise about Suii have a look at RoboCup Team Description paper down below: